Romi Escape Maze
In RBE 2002: Sensing at WPI, each student is given a Polulu Romi and a challenge. The Romi must escape from a randomized maze through a series of tasks, completely autonomously. Some tasks require flashing a LED receiver a secret code only obtained by a randomized AprilTag. Others involve scaling a wobbly ramp, requiring a Romi to act as a counterbalance to continue. In order to escape, these Romis (Romae?) must communicate with each other and transition between different states seamlessly.
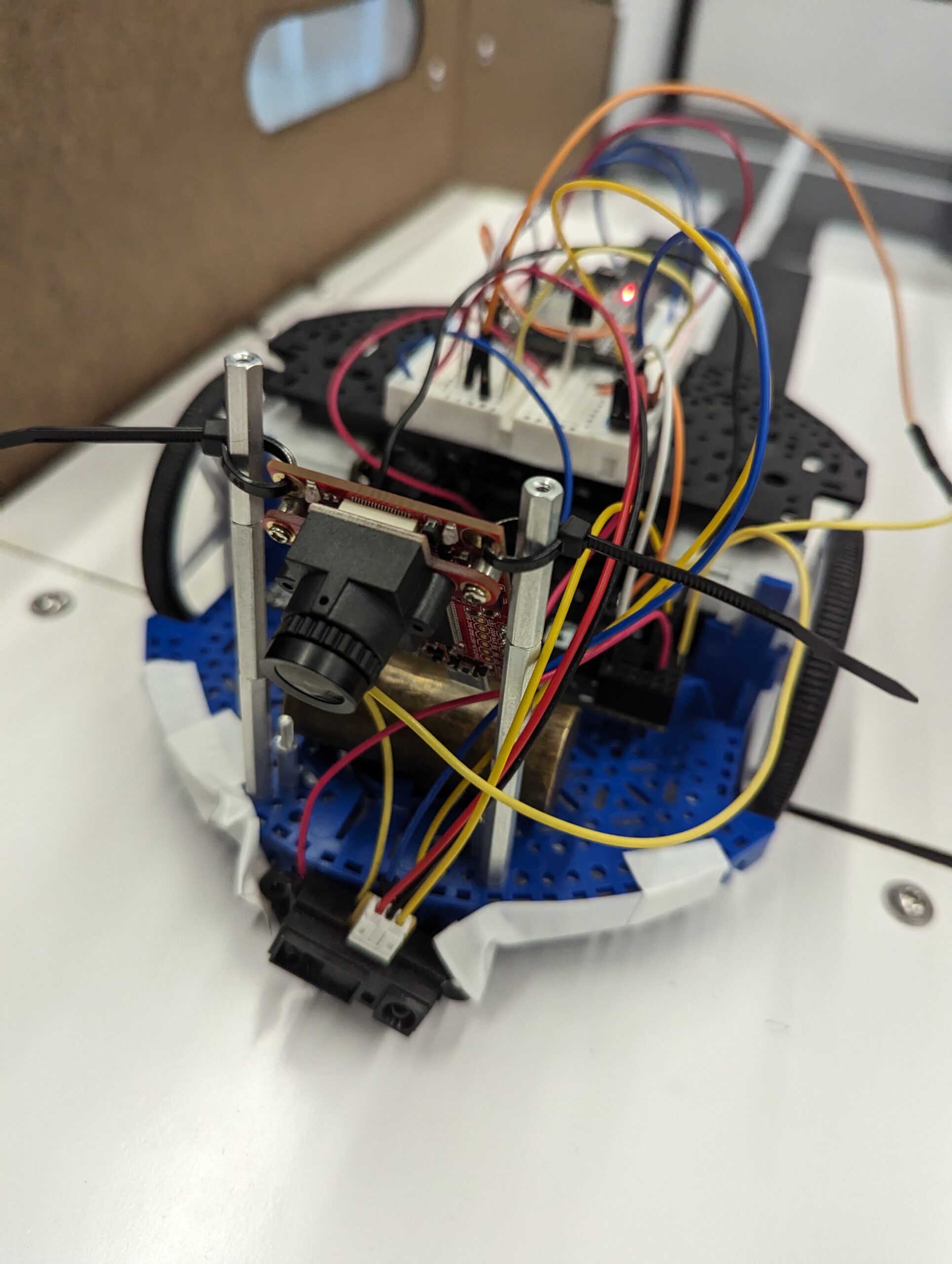
In order to accomplish this task, each Romi was connected to a WiFi broker to relay information between each other and were equipped with several sensors. An OpenMV camera was used to recognize and decode AprilTags both for navigation throughout the maze and to determine the secret code to the escape room. An infrared proximity sensor and reflectance sensor array were used to calculate location in the maze, collision detection for turning, and was time to turn before collision. Finally, an internal gyroscope in the Romi calculated pitch and determined if the Romi was on the ramp.